
パナソニック技報
【5月号】MAY 2018 Vol.64 No.1
(2018年5月15日公開)
特集:IoT・AI・ロボティクス
IoT時代を迎え,モノを作るだけにとどまらず,モノを通じてサービスを提供するコトづくりが重要となってきています.当社では,モノをつないで情報を収集するIoT,情報を分析し新たな価値を創出するAI,そしてお客様に価値を届けるロボティクスの3つの技術を融合することにより,モノを通じた新たな顧客体験や価値を提供できるサービス中心の新事業創出に取り組んでいます.本特集では,IoT・AI・ロボティクスについて,当社の具体的な開発事例を交えながら紹介します.

IoT・AI・ロボティクス特集によせて
パナソニック(株) ビジネスイノベーション本部 AIソリューションセンター 所長 九津見 洋

招待論文
確率的生成モデルとディープラーニングに基づくAIの家庭環境への実装に向けて
立命館大学 情報理工学部 教授 谷口 忠大
家庭やオフィス環境にAIを導入し,ユーザーを支援していくことは,大きなチャレンジだ.このために,ディープラーニングと確率的生成モデルの統合が注目されている.本論ではこの統合を軸に,新しい人工的な認知システムを家庭環境で活(い)かしていく道筋に関して議論する.
技術論文・技術解説
[論文]パナソニックのIoTサービスを支えるクラウドプラットフォームの開発
浅井 将則,西村 敦,西内 義信,小杉 克也,前川 肇
当社IoTサービスに必要なソフトウェア技術を社内で徹底的にコモディティ化させるとともに,グローバルなサービス提供に耐える安定稼動を実現するクラウドベースの全社共通利用が可能なプラットフォームを構築した.
代表図

[論文]IoT機器のための暗号・認証技術,およびサイバー攻撃検知,対策技術
松尾 正克,古賀田 勝則,田中 裕之,武藤 浩二,小林 正明
CPUパワーの劣るIoT機器に対して,PC機器と同等の暗号・認証機能,および,それだけでは防ぎ切れないサイバー攻撃に対する攻撃検知機能,リモートメンテナンス機能を開発し,既知,未知のサイバー攻撃を防ぎ,安全にシステム運用できるサービスを実現した.
代表図

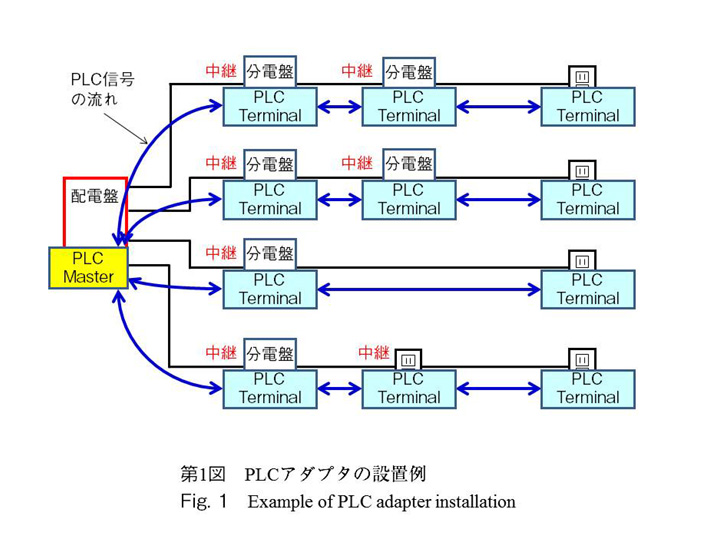
[解説]「HD-PLC」最新技術動向と活用事例
古賀 久雄
IEEE 1901準拠の「HD-PLC(注1)(High Definition Power Line Communication)」にITU-T G.9905準拠のマルチホップ技術を適用することで,分電盤を超えた高速電力線通信が可能となった.これにより,分電盤ごとにPLCアダプタを設置して建物内を広範囲にカバーすることで,住居内だけでなく商業ビルや工場など大きな建物内でも電力線通信利用によるネットワーク構築ができるようになった.
(注1)当社の登録商標または商標
代表図
[解説]ラベル伝搬法に基づく店舗でのキャンペーン推薦方式
宮田 淳司,伊藤 智祥
小売店向けに,キャンペーン手法の推薦を行う方法を提案する.提案法はPOS・商圏データの類似性を用いたラベル伝搬法により,実施実績のない店舗でもキャンペーン効果推定を可能12 %の売上増加が期待できると試算された.
代表図

[論文]対話サービスプラットフォームの開発
山上 勝義,遠藤 充,史 宏杰,牛尾 貴志,藤原 菜々美,堀井 則彰
対話技術の実用化を加速するため,対話技術群を統合した対話サービスプラットフォームを開発した.共通の対話処理の枠組みの提供により,対話サービスの開発工数を大幅に低減した.
代表図

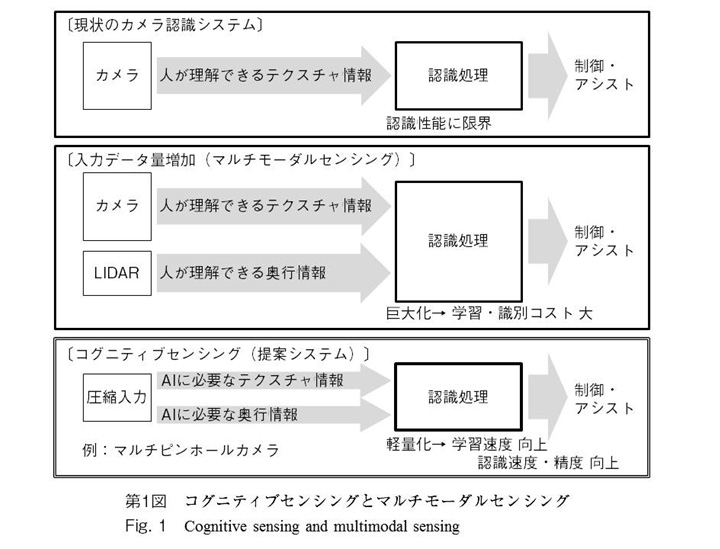
[論文]コグニティブセンシング:マルチピンホールカメラ画像からのディープラーニングによる奥行推定
佐藤 智,ポンサク ラサン,シェン メイシェン,若井 信彦,登 一生,吾妻 健夫
認識に有効な情報のみを効率的に取得し,軽量ハードウェアで高性能な認識を実現するコグニティブセンシングの概念を提案する.具体例として,マルチピンホールカメラ画像からの奥行推定において,入力データ量が等しい従来カメラと比較し,推定精度の向上を確認した.
代表図
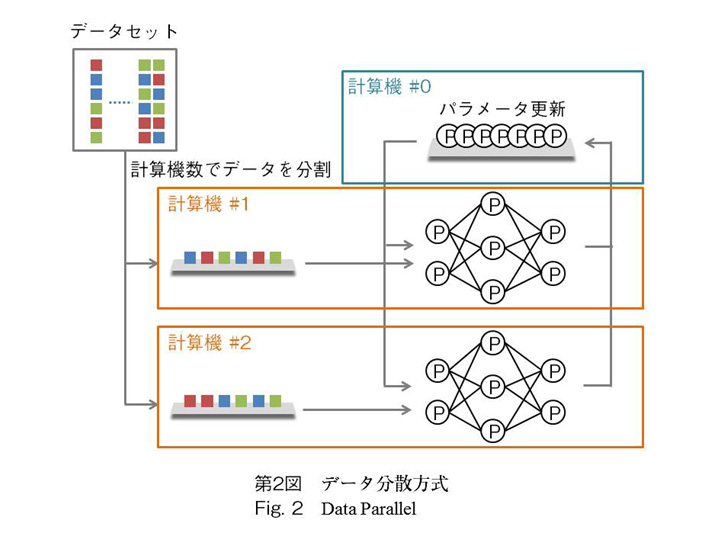
[論文]スーパーコンピュータを活用したディープラーニング分散学習の高効率開発基盤
竹中 慎治,柴田 俊介,田口 雄太,竹田 博昭,寺田 徹,合田 陽一
ディープラーニングに関する研究・開発期間の短縮化を目的に,並列計算処理が可能なスーパーコンピュータを活用した分散学習環境を構築した.公開データによる実験では,128GPUを使い1GPUに対して101倍の高速化を確認した.
代表図
[解説]パナソニックにおけるAI人材強化
新井 稔也,山田 和宏
事業成長に向けた重点技術として,全社のAI技術を強化すべく,採用と人材育成の活動を推進している.人材探索活動や座学・eラーニングを併用したスキル強化など,1000人規模のAI開発体制を目指した取り組みを紹介する.
代表図

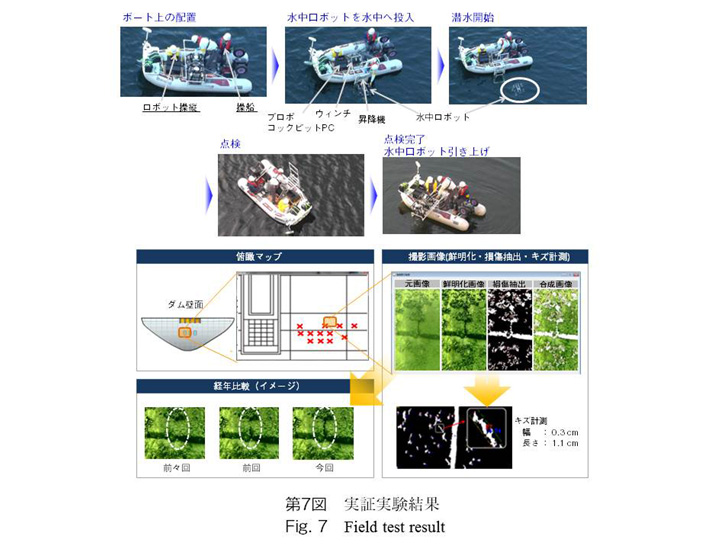
[論文]自律制御による姿勢安定航行型ダム点検ロボットと損傷解析システム
九郎丸 俊一,中西 清史,久保 聖治,海老名 明弘,江澤 弘造
従来のダム点検における,損傷の程度や位置などを定量的に評価できないという課題に対して,壁面を高精細に撮影する自律制御型の水中ロボットと損傷を自動抽出する解析システムを開発した.本開発により,点検業務を省力化し,人手に比べ精度良く,定量的に診断することが可能になった.
代表図
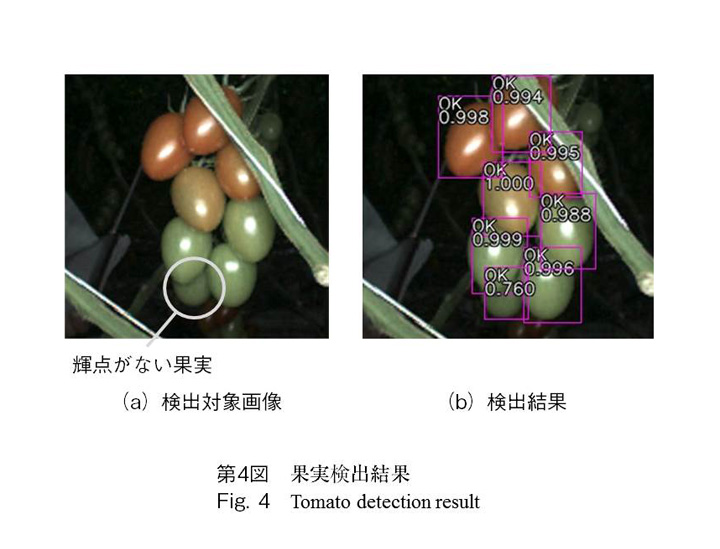
[論文]環境認識にAIを用いたトマト収穫ロボット
上垣 俊平,荒木 秀和,戸島 亮,新崎 誠,上田 大介,山崎 龍次
農園環境のなかで自動収穫を行うロボットに対して,ディープラーニングを用いた画像処理技術を開発し,一部分しか見えない果実の検出や詳細な環境認識が可能なことを確認した.
代表図
[論文]自動停止機能・自律移動機能を有するロボティック電動車いす
上松 弘幸,今岡 紀章,グエン ジュイヒン,笹井 裕之,北澤 一磨,安藤 健
大規模施設内での移動サービスの提供を目的として,自動停止・自律移動機能を備えたロボティック電動車いすを開発した.特に,対象物へ接近するための2段階停止技術,複数台の隊列走行技術を開発し,空港での実証により有効性を確認した.
代表図

[論文]多品種商品識別機能を有する倉庫内自動棚入れ棚出しロボットの開発 - Amazon Robotics Challenge 2017参加報告 -
岡田 征剛,陽 品駒,岡﨑 安直,浅井 勝彦,山本 正樹,グスタボ ガルシア
物流倉庫におけるロボットの自動棚入れ棚出し能力を競う国際大会であるアマゾンロボティクスチャレンジ2017に出場した.競技の鍵となる物体認識において,複数の認識システムを組み合わせることによりロバストなシステムを実現した.
代表図
