
第68回電気科学技術奨励賞を受賞
2020年11月25日、第68回電気科学技術奨励賞(旧オーム技術賞)が決定し、パナソニックグループから1件が受賞しました。
同賞は、電気科学技術に関する発明、研究・実用化、ソフトウェア開発、教育等で優れた業績を上げ、日本の諸産業の発展及び国民生活の向上に寄与し、今後も引き続き顕著な成果の期待できる人に対し、公益財団法人 電気科学技術奨励会より贈呈されるものです。
今回、当社の受賞者と業績は、以下のとおりです。
電気科学技術奨励賞
『トマト収穫ロボットの開発と実用化』
受賞者
戸島 亮 :マニュファクチャリングイノベーション本部 課長
荒木 秀和:マニュファクチャリングイノベーション本部 主幹技師
岡本 眞二:コネクティッドソリューションズ社 イノベーションセンター 主幹技師

左から荒木、戸島、岡本
開発の背景
近年、国内外の農業において収穫などの作業を行う労働者の確保が大きな課題になっています。その中でも、農業の自動化促進や利便性向上を目的としたスマート農業への注目と期待が高まっており、農業の中でも、人が作業をする割合が高く、年間を通じて栽培が行われているトマトに着目し、人への依存度が作業全体の30%程度を占める収穫作業の自動化を行うトマト収穫ロボットを開発しました。
開発技術の概要
トマト収穫ロボット(図1)は、収穫対象の果実、ならびに果実周辺の茎や果梗の検出と、その位置を特定するためのAI画像認識部、収穫作業を行うアームやエンドエフェクタ(実際に果実を収穫する機構)などのマニピュレータ部、および障害物を避けて高速で収穫することを可能とするアームの高速制御部から構成され、農園内の特殊な環境に適用したロボット制御技術と認識情報に基づきロボットの各ユニットを効率的に動作させるアルゴリズムを新規に開発しました。
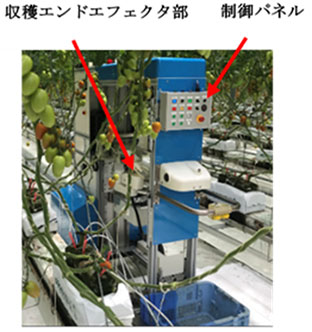
図1 トマト収穫ロボット
(1)AI画像認識技術
CPU/GPUの処理能力に制約がある組込み機器でAIによる推論を実現するために、独自のAI画像認識技術をベースに処理の軽量化や演算高速化等が可能な深層学習ネットワーク技術を新規に構築し、従来の検出率約70%に対して、人の検出率と同等以上でかつ商用利用できるレベルの約98%の検出率を実現しました(図2)。
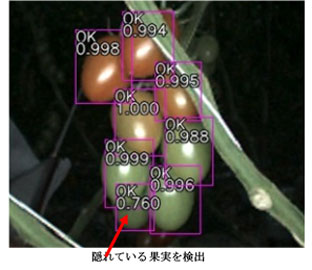
図2 AIによる果実検出結果
(2)アームの高速制御
本ロボットでは、動作の高速化を目的として、水平多関節のアームを高さ方向に動く駆動軸に取り付け、アームを高さ方向と水平方向に移動させる2段階動作を行っています。また、走行中に収穫対象果実を探索し、その高さにアームを移動させておくことでタクトの短縮を実現し、撮像開始からアームが動き出すまでの時間を短縮させています。さらに、収穫できる果実が一つの房に複数ある場合には、1つ目の果実の収穫動作の間に、2つ目以降の果実を収穫するための経路計算を実施させ、タクトロスすることなく連続して収穫することを可能としています。
(3)果実を傷つけずに収穫するエンドエフェクタの設計とその制御技術
トマトの人手による一般的な収穫は、果梗にある離層と呼ばれる部分で果実を房から引き離すもぎ取りにより行われています。本収穫ロボットのエンドエフェクタは、図3で示す独自開発の2重リング方式を採用し、人のもぎ取り動作と同様に、ヘタを付けたまま果実を房から引き離すことを実現しています。
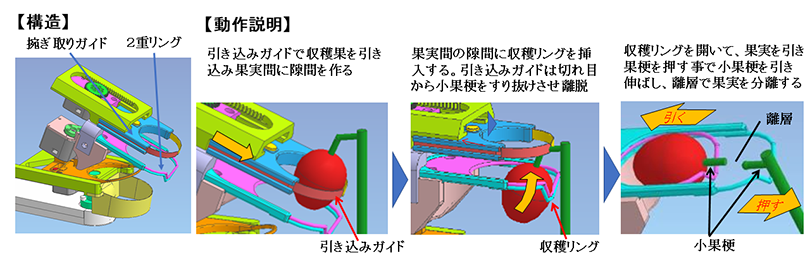
図3 エンドエフェクタ部の構造と動作説明
(4)収穫ロボットを運用する遠隔監視システム
夜間収穫の実現と円滑なロボット運用管理に向け、衝突防止・栽培周辺物の巻き込み防止などの安全対策を強化した上で運用管理の自動化に向けた遠隔監視システムを開発することで、利便性と安心・安全な運用を実現しました(図4)。これにより従来実施が困難であった「夜間収穫」を可能としています。
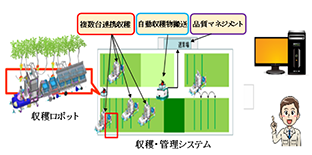
図4 運用管理イメージ
開発技術の成果
これらの開発により、日本初の「24時間収穫農園」を実現するとともに、茎や葉などの障害物を避けて高速で収穫し、かつトマトに傷を付けない、これまでにないトマト自動収穫技術を農園実証を通じて確立し、トマト自動収穫ロボットとして実用化を行いました。さらに、花き果菜類に加えて、アスパラガスなど地面から生育する種類の作物等にも展開することで、農業における労働問題の解決に貢献して行きます。
尚、本技術開発は、農林水産省「AIプロジェクト(平成29年度~令和2年度)」の支援を受けて実施し、実証は、農林水産省「スマート農業加速化実証プロジェクト(令和元年度~令和2年度)」の支援を受けて実施致しました。
受賞者コメント

戸島 亮
この度は名誉ある賞を頂き、誠にありがとうございます。農林水産省様、実証にご協力を頂いた農園様をはじめ、ご支援頂いた皆様に改めて感謝申し上げます。今後は本取組で開発した自動収穫ロボットを農園に導入し、日本の農業のスマート化に貢献するとともに、ロボットに搭載した認識技術や制御技術を応用展開することで、ロボットの社会実装によるより良い暮らしの実現を目指していきたいと思います。

荒木 秀和
この度は歴史と名誉ある賞をいただき、大変光栄に存じます。また、農林水産省様をはじめ、本開発にご支援いただいた皆様に感謝の意を申し上げます。本取組では、農業における労働力不足を解消することを目指し、弊社で培ってきましたロボティクス技術とAI技術を活用して、トマト収穫ロボットを開発・実用化しました。今後も社会課題の解決に貢献するロボットの開発を推進していきたいと思います。

岡本 眞二
この度は大変名誉ある賞を頂き、誠にありがとうございます。ご支援頂いた皆様に心より感謝申し上げます。本取組は、厳しい環境が続く農業分野において労働力不足の解消や生産性向上を目指し、最も工数の係るトマトの収穫作業をロボティクスで実現しました。更に無線技術や遠隔監視制御技術、AIによる果実認識や生産管理支援など先進技術の投入によりスマート農業実現に先鞭をつけることも出来ました。今後は具体的な社会実装に向けた取組を加速し、安全安心な食の実現に寄与して参ります。